Astra Robotics
The robotics club of RVCE Bangalore
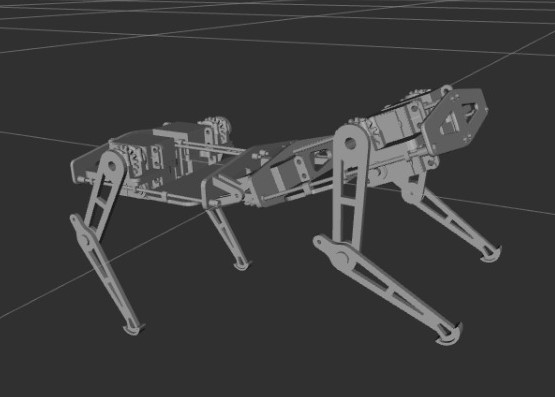
Doggo - A Quadruped
Quadruped robots can mimic animal walking gait and they have certain advantages like walking on terrain and extremely rough surfaces. Obstacles can impede the movement of wheeled vehicles, where a quadruped can adapt to avoid obstacles by adjusting its height.
The Inverse Kinematics Solutions are derived for the developed structure using Denavit-Hartenberg convention and using those solutions the movements are simulated using Robot Operating System (ROS) and Gazebo.
In order to maintain locomotion the center of gravity of the walker must be supported either statically or dynamically. Static support is provided by ensuring the center of gravity is within the support pattern formed by legs in contact with the ground. Dynamic support is provided by keeping the trajectory of the center of gravity located so that it can be repositioned by forces from one or more of its legs
Such automated machines have taken over the duties of dangerous and mundane jobs from humans, allowing greater productivity. Farmers can take advantage of the new technology, along with the goods delivering agencies, offices and IT tech parks, and many more.
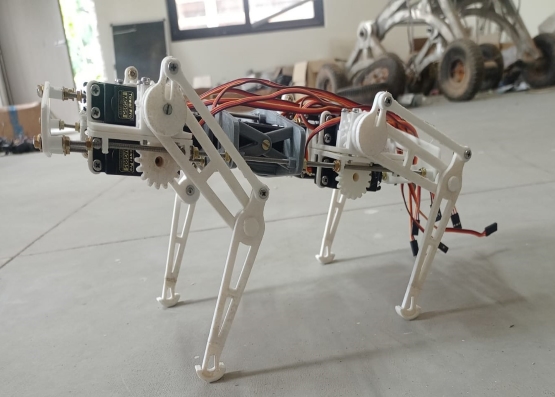
A journey of the smaller version "Puppy" is presented here.
- Saksham Sharma
.jpg)